|
Mum söndüren robot projesi, mumları bularak üzerinde bulunan fan ile söndürmek amacıyla hazırlanmış bir robot projesidir.
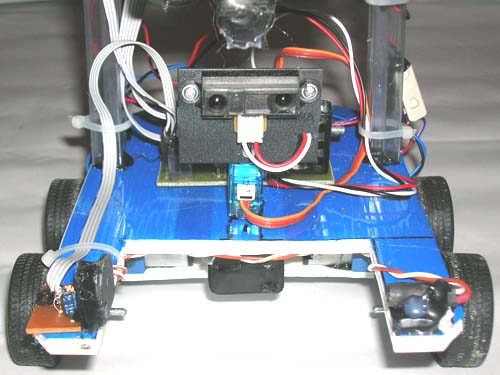
Mum söndüren robot projesinde, mumları algılamak için bir adet Sharp GP2Y0A21YK0F sensör kullanılmıştır. Robot üzerinde bulunan sharp sensörün etrafı tarayarak mumu bulabilmesi için sensör bir servo motorun üzerine monte edilmiştir. Sharp sensör mumu tespit ettiğinde, mumu bulduğu nokta referans alınır ve robot bu referans noktasına doğru döner. Dönüş yapıldıktan sonra robot mumun bulunduğu noktaya doğru hareket eder. Hareket süresince servo motor sağa sola küçük açılı taramalar ile mumun bulunduğu noktayı kontrol eder. Eğer bir sapma olursa, bunu düzelterek robotun muma doğru düzgünce yaklaşmasını sağlar. Belli bir mesafeye geldiğinde robot ileri doğru hareket eder ve robotun muma yeterince yaklaşıp yaklaşmadığı TSOP1738 IR sensör ile kontrol edilir. Eğer yeterince yaklaşmışsa robot durur ve mumu söndürme aşamasına geçilir.
Mum söndüren robot başlangıçta bulunduğu ortamın sıcaklığını fanın üzerine yerleştirilmiş olan DS1821 sıcaklık sensörü ile ölçer. Ölçülen bu sıcaklık değeri referans sıcaklığı olarak saklanır. Robot mumu bulduğunda DS1821 ile sıcaklık ölçümü yaparak mumun yanıp yanmadığı kontrol edilir ve yanan mumu söndürmek için fan çalıştırılır. Mumun söndüğü algılandığında fan kapatılır.
Mum Söndüren Robot Projesi |
| |
Mum söndüren robot PIC16F877A mikrodenetleyicisi ile kontrol edilmektedir. Robotun hareketini sağlayan DC motorlar PWM ile kontrol edilerek daha hassas hareket etmesi sağlanır. (muma yaklaşırken)
Mum söndüren robot standart bir robot projesi değildir. Satışı yapılmamaktadır. |