|
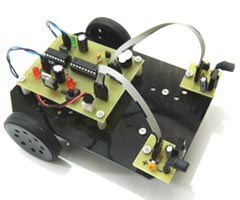
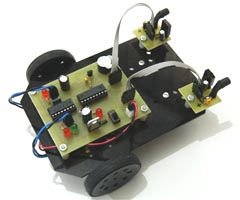
 Engelden kaçan robot üzerindeki iki adet engel algılama sensörü ile karşısına çıkan engelleri algılayıp bu engellere çarpmadan hareketini sürdürecek şekilde hazırlanmıştır. Engelden kaçan robot üzerindeki iki adet engel algılama sensörü ile karşısına çıkan engelleri algılayıp bu engellere çarpmadan hareketini sürdürecek şekilde hazırlanmıştır.
Engelden kaçan robotta PIC16F628A mikrodenetleyici kullanılmıştır.
Engelden kaçan robot 1 adet 9 V alkalin pil ile çalışmaktadır.
Engelden kaçan robotun ana devresi üzerinde; pic devresi (PIC16F628A), voltaj regülatörü (LM7805) ve motor sürücü devre bulunmaktadır.
Robot devresinde motor sürücü olarak L293D motor sürücü entegresi kullanılmıştır.
Engel algılama sensörleri TSOP1738 IR alıcı modül ve IR led kullanılarak hazırlanmıştır.
| Engelden Kaçan Robot V1 Videosu |
|
|