Terminatör 4 motorlu hem savunma hem de saldırı özelliğe sahip bir robottur. Terminatör 2009 yılında yapılan Uluslararası ODTÜ Robot Günlerinde birincilik almıştır. 2009 Uluslararası ODTÜ Robot Günleri 'nin mini sumo robot final karşılaşması videosu sayfanın altında yer almaktadır.
Terminatör 'de 2 tane önde, sağda, solda ve arkada birer tane olmak üzere toplam 5 tane rakip algılama sensörü vardır. Bu sensörler sitemizdeki IR alıcı - verici sensör devreleri ile aynıdır.
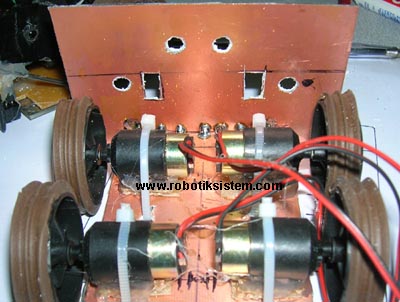
Terminatör 'ün gövdesi epoksi malzeme kullanılarak hazırlandı. 4 adet 6 V faulhaber redüktörlü dc motor kullanıldı. Faulhaber motorlarına 4 cm çapında oyuncak araba tekerleri eklendi. Tekerleklerin üzeri sürtünmeyi artırmak için izolasyon malzemesiyle kaplandı. Motorlar gövdeye direk sabitlendiğinde gövdenin yerden yüksekliği fazla olduğu için motorların altına parça eklenerek sabitlendi. Böylece robotun gövdesinin yerden yükseliği minimum seviyeye çekildi.
Terminatör 'ün Yapım Fotoğrafları |
 |
 |
|
|
Robotun ön tarafı için çok büyük bir eğik düzlem yapılmadı. Ön parça ile motorların bağlı olduğu parça, resimde de görüldüğü gibi lehim kullanılarak birbirine sabitlendi. Sabitlenirken robotun ağırlığı göz önüne alınarak robot ağırlığı önce 500 grama çekildi ve daha sonra ön tarafı yere sıfır olacak şekilde birleştirildi.
Ağırlık konma sebebi; kullanılan tekerlekler eğer yumuşak ve 4 adet tekerlek kullanılıyor ise robotun önüne böyle parçalar hafifken eklenmesi durumunda robot bitirildiğinde robotun ön tekerlekleri yerle çok fazla teması kalmıyor. Bu durumda ön motorların yarışma sırasında rakip ittirmede fazla bir etkisi olmuyor.
Terminatör PIC16F628A mikrodenetleyicisi ile kontrol edilmektedir. Motor sürücü olarak L293D entegresi kullanılmıştır. Programlama dili olarak pic c kullanılmıştır.
Terminatör 'ün programında 5 saniye içerisinde rakibini yerini belirlemesi ve direk üzerine gitmesi karşılaşmaları kazanması büyük için kolaylık sağlamıştır. Yarışmalarda robotların dohyo üzerine konduğunda ön yüzleri farklı taraflara bakacak şekilde yerleştirilir. Terminatör 'ün sağ ve sol tarafındaki sensörleri 5 saniyelik bekleme süresinde aktif haldedir.
 |
Eğer rakip sumo Terminatör 'ün sol tarafında ise sol sensör 5 saniyelik sürede yerini belirliyor ve sola dönerek direk üzerine doğru gidiyor.
|
 |
Eğer rakip sumo Terminatör 'ün sağ tarafında ise sağ sensör 5 saniyelik sürede yerini belirliyor ve sağa dönerek direk üzerine doğru gidiyor.
Terminatör 'ün karşılaşmalara başlangıç videosunu izlemek için tıklayınız. |
2009 UORG Mini Sumo Robot
Final Karşılaşması |
|
|