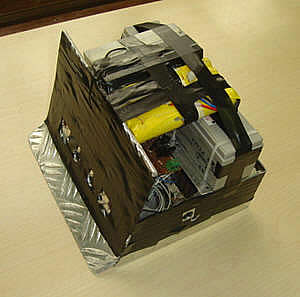
| The Bull Sumo Robot |

The Bull has two geared DC motor. Four IR sensors were used for detection of the opponent sumo robot and 4 CNY70 sensors were used for detection of the borders of the ground .
|
|
|
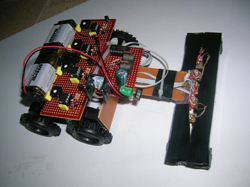
| ATOM Micro Sumo Robot |
 ATOM is a micro sumo robot. Its size is 5 cm x 5 cm x 5 cm and it weights only 73 gram. ATOM has a CNY70 sensor and an IR sensor. The microcontroller was PIC16F628A. ATOM is a micro sumo robot. Its size is 5 cm x 5 cm x 5 cm and it weights only 73 gram. ATOM has a CNY70 sensor and an IR sensor. The microcontroller was PIC16F628A.
|
|
|
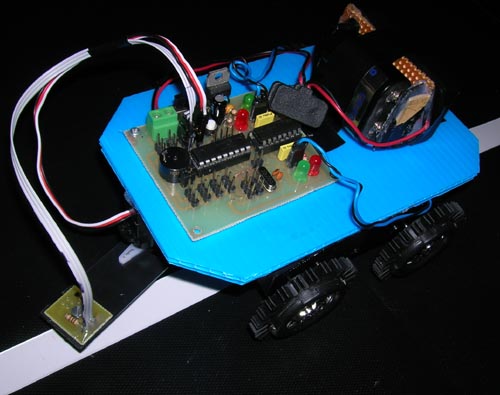
| SCOUT Line Follower Robot With One Sensor |
|
Scout is a line follower robot that follows the white path on a black surface. Its difference from the standard line follower robots is that it has only one CNY70 sensor to detect the line. This CNY70 sensor was adapted to a micro servo motor so that Scout can move this sensor and follows the line smoothly.
Scout's microcontroller is PIC16F628A. Two DC motors were used its driving system and these motors were driven by L293D motor driver.
|
|
|
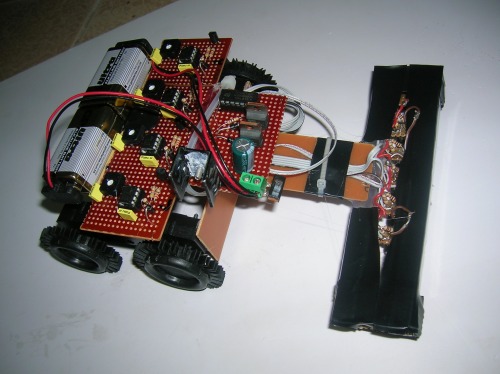
Line Follower Robot Without Microcontroller |
 This is a simple line follower robot that is designed for the purpose of applying pwm control with opamps without using any microprocessor. It follows the white path on a black surface. This is a simple line follower robot that is designed for the purpose of applying pwm control with opamps without using any microprocessor. It follows the white path on a black surface.
The robot has five CNY70 reflective optical sensors and five NE555 opamps. Two mosfets (IRFZ44) was used to drive the motors. There is also a 74HC14 Schmitt Triger on the circuit board to transmit the signals from CNY70 sensors to the opamps
Although the robot has no microcontrollers, it is still very effective and has a smooth motion on the path.
watch its video |
|
|
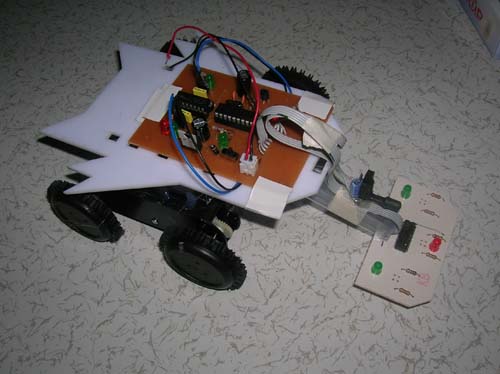
Obstacle Avoider Line Follower Robot |
 This is a standart line following and obstacle avoiding robot model. As a line follower it follows the white path on black surface. When it detects an obstacle on the way it stops a short time and changs its way to not crush the obstacle. Therefore, it keeps moving and finds its own way. It has three CNY70 reflective optosensors to detect the white path on black surface and an IR sensor to detect the obstacles while it follows the path. The IR sensor circuit was prepared by using TSOP1738 IR Receiver. It is controlled by PIC16F628A microcontroller that was programmed with C. Its two dc motors are driven by L293D. This is a standart line following and obstacle avoiding robot model. As a line follower it follows the white path on black surface. When it detects an obstacle on the way it stops a short time and changs its way to not crush the obstacle. Therefore, it keeps moving and finds its own way. It has three CNY70 reflective optosensors to detect the white path on black surface and an IR sensor to detect the obstacles while it follows the path. The IR sensor circuit was prepared by using TSOP1738 IR Receiver. It is controlled by PIC16F628A microcontroller that was programmed with C. Its two dc motors are driven by L293D.
watch its video |
|
|
HUNTER ( Mini Sumo Robot) |
 Hunter is a four wheeled mini sumo robot with geared dc motors. The geared DC motors are 6 V 600 rpm. To control the high speed of these motors and not to get out of the sumo robot arena, it has a specific programme. It detects its opponent by its TSOP1738 IR sensors. There are 4 IR sennsors; two of them are on the front face and the other two are on the each sides. To detect the white path around the arena, it uses two QRD1114 reflective optosensors. It is controlled by PIC16F877A and the DC motors are controlled with L293D integrated motor driver circuit. Hunter is a four wheeled mini sumo robot with geared dc motors. The geared DC motors are 6 V 600 rpm. To control the high speed of these motors and not to get out of the sumo robot arena, it has a specific programme. It detects its opponent by its TSOP1738 IR sensors. There are 4 IR sennsors; two of them are on the front face and the other two are on the each sides. To detect the white path around the arena, it uses two QRD1114 reflective optosensors. It is controlled by PIC16F877A and the DC motors are controlled with L293D integrated motor driver circuit.
watch its video |
|
|