ROBOTS AND APPLICATIONS OF ROBOTICS ROBOTS AND APPLICATIONS OF ROBOTICS
Robotics is the engineering science and technology which involves the conception, design, operation and manufacture of robots. Electronics, mechanics and software are brought together by robotics.
Robots are used for jobs that are dirty, dull and dangerous. Today robotics have many different application areas. Some of those are:
 Outer Space Applications: Robots are playing a very important role for outer space exploration. The robotic unmanned spacecraft is used as the key of exploring the stars, planets...etc. Outer Space Applications: Robots are playing a very important role for outer space exploration. The robotic unmanned spacecraft is used as the key of exploring the stars, planets...etc.
 The most famous robots used in the outer space applications are the Mars rovers of NASA. In 1997 The Pathfinder Mission landed on Mars. Its robotic rover Sojourner, rolled down a ramp and onto Martian soil in early July. It continued to broadcast data from the Martian surface until September. The most famous robots used in the outer space applications are the Mars rovers of NASA. In 1997 The Pathfinder Mission landed on Mars. Its robotic rover Sojourner, rolled down a ramp and onto Martian soil in early July. It continued to broadcast data from the Martian surface until September.
Sojourner performed semi-autonomous operations on the surface of Mars as part of the Mars Pathfinder mission; equipped with an obstacle avoidance program. Sojourner was capable of planning and navigating routes to study the surface of the planet. Sojourner's ability to navigate with little data about its environment and nearby surroundings allowed the robot to react to unplanned events and objects.
 After Sojourner's mission NASA sent twin robots Spirit and Opportunity to the Red Planet on 10, June and 23, July 2003. Spirit and Opportunity landed on Mars on 4, January and 25, January 2004. After Sojourner's mission NASA sent twin robots Spirit and Opportunity to the Red Planet on 10, June and 23, July 2003. Spirit and Opportunity landed on Mars on 4, January and 25, January 2004.
Spirit and Opprtunity are solar powered robots with six wheels included their own motors. Both of the Mars Rovers are 1,5 m high, 2,3 m wide and 1,6 m long and weighing 180 kg. Spirit and Opportunity have many science instruments in order to perform their missions on Mars. They have a robot arm, that contains a Mössbauer spectrometer to investigate the mineralogy of the rocks and soils on Mars, an Alpha particle X-ray spectrometer for analysis of elements found in rocks and soils, a rock abrasion tool used to expose the fresh material for examination, a microscopic imager and magnets to collect magnetic particles.
 The twin Mars Rovers have a panoramic camera used for examinations of the texture, color, mineralogy, and structure of the local terrain, a miniature thermal emmision spectrometer for identification promising rocks and soils which is useful to determine the formation processes of them. There is also a navigation camera on both Mars rovers in order to take view with a higher field but lower resolution for driving and navigation. The twin Mars Rovers have a panoramic camera used for examinations of the texture, color, mineralogy, and structure of the local terrain, a miniature thermal emmision spectrometer for identification promising rocks and soils which is useful to determine the formation processes of them. There is also a navigation camera on both Mars rovers in order to take view with a higher field but lower resolution for driving and navigation.
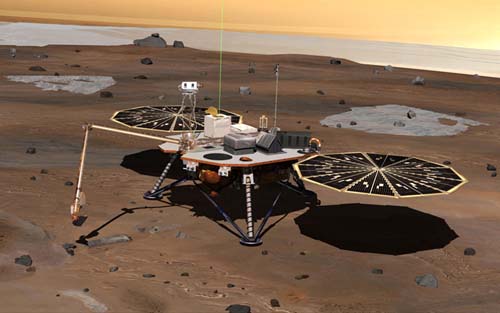
Phoenix Mars Rover was sent to the Red Planet on 4, August 2007 and landed on 25, May 2008. The mission of the Phoenix was to investigate the existence of water and life supporting conditions on Mars.
Military Applications: In today's modern army robotics is an important factor which is researched and developed day by day. Already remarkable success has been achieved with unmanned aerial vehicles like the Predator drone, which are capable of taking surveillance photographs, and even accurately launching missiles at ground targets, without a pilot. There are many advantages in robotic technology in warfare however, as outlined by Major Kenneth Rose of the US Army's Training and Doctrine Command: ''Machines don't get tired. They don't close their eyes. They don't hide under trees when it rains and they don't talk to their buddies...A human's attention to detail on guard duty drops dramatically in the first 30 minutes ... Machines know no fear.''
Intelligent Home Applications: We can monitor home security, environmental conditions and energy usage with intelligent robotic home systems. Door and windows can be opened automatically and appliances such as lighting and air conditioning can be pre programmed to activate. This assists occupants irrespective of their state of mobility.
 Industry: From the beginning of the industrial revolution robotics and automation becomes the most important part of manufacturing. Robotic arms which are able to perform multiple tasks such as welding, cutting, lifting, sorting and bending are used in fabrics. Industry: From the beginning of the industrial revolution robotics and automation becomes the most important part of manufacturing. Robotic arms which are able to perform multiple tasks such as welding, cutting, lifting, sorting and bending are used in fabrics.
The most commonly used configurations of the industrial robots are:
* Articulated Robots: An articulated robot is one which uses rotary joints to access its work space. Articulated robots can range from simple two-jointed structures to systems with 10 or more interacting joints.The six-axis, articulated robot is the most versatile industrial robot which allows for a high level of freedom.
* Cylindirical Coordinate Robots: These robots have three degrees of freedom and they moves linearly only along the Y and Z axes with a cylindirical work envelope.
 * Scara Robots: It stands for Selective Compliant Assembly Robot Arm or Selective Compliant Articulated Robot Arm. SCARA robots usually have four axes as any X-Y-Z coordinate within their work envelope and a fourth axis of motion which is the wrist rotate (Theta-Z). * Scara Robots: It stands for Selective Compliant Assembly Robot Arm or Selective Compliant Articulated Robot Arm. SCARA robots usually have four axes as any X-Y-Z coordinate within their work envelope and a fourth axis of motion which is the wrist rotate (Theta-Z).
* Spherical Coordinate Robots: The sperical arm, also known as polar coordinate robot arm, has one sliding motion and two rotational, around the vertical post and around a shoulder joint.
 *Cartesian Coordinate Robots: Rectangular arms are sometimes called "Cartesian" because the arm´s axes can be described by using the X, Y, and Z coordinate system. It is claimed that the cartesian design will produce the most accurate movements. *Cartesian Coordinate Robots: Rectangular arms are sometimes called "Cartesian" because the arm´s axes can be described by using the X, Y, and Z coordinate system. It is claimed that the cartesian design will produce the most accurate movements.
*Delta Robots: A Delta robot consists of three arms connected to universal joints at the base. The key design feature is the use of parallelograms in the arms, which maintains the orientation of the end effector. The Delta robot has popular usage in picking and packaging in factories.
Health Service: Under development is a robotic suit that will enable nurses to lift patients without damaging their backs. Scientists in Japan have developed a power-assisted suit which will give nurses the extra muscle they need to lift their patients - and avoid back injuries.
|
|