|
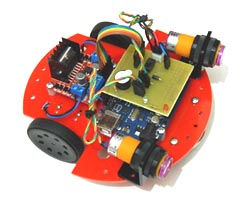
 Arduino obstacle avoider robot has two MZ80 infrared sensors for obstacle detection. Arduino obstacle avoider robot has two MZ80 infrared sensors for obstacle detection.
Arduino Uno R3 is used as the controller board of the obstacle avoider robot.
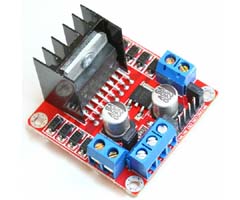
L298N motor driver board is used for driving of geared DC motors.
The robot has two infrared sensors for detection of objects during moving. The sensitivities of the sensors may be tuned.
Robot chassis is prepared with 3 mm thick 150 mm diameter plexiglass material.
The robot has two 6 V geared DC motors, two wheels and a caster ball wheel.
Arduino obstacle avoider robot is powered by a 9 V alkaline battery.
| Arduino Obstacle Avoider Robot Video |
|
|