|
 Arduino obstacle avoiding line follower robot follows white path on a black surface and stops when it detects and obstacle on the road. Arduino obstacle avoiding line follower robot follows white path on a black surface and stops when it detects and obstacle on the road.
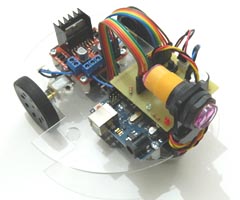
The robot is controlled by an Arduino Uno R3.
RS Arduino Uno Shield is used on the robot which contains the input / output headers, on/off switch and a buzzer on it.
L298N motor driver board is used for driving the geared DC motors.
3 TCRT5000 sensors are used for tracking the line and a MZ80 infrared sensor is used for obstacle detection.
Robot chassis is prepared with 3 mm thick plexiglass material.
The robot has two 6 V 150 rpm geared DC motors, two wheels and a caster ball wheel.
Arduino obstacle avoiding line follower robot is powered by a 9 V alkaline battery.
| Arduino Obstacle Avoiding Line Follower
Robot Video |
|
|