|
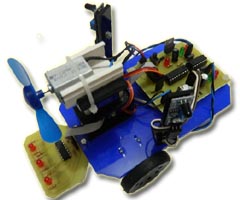
Fire fighting robot 2 follows the white path on a black surface and detects the flames of the candles on the both sides of the road.
 The robot has two flame sensors to detect the candle flames on the sides of the road. The robot has two flame sensors to detect the candle flames on the sides of the road.
The fan of the robot is placed on a servo motor to be turned to the side where the flame is detected.
When the robot detects a flame, the robot stops and the fan is turned to the flame and blows it out.
After the flame goes out, the robot continues to follow the path until it detects another flame.
The robot is controlled with a PIC16F628A microcontroller and it has thre TCRT5000 sensors to track th line.
Robot chassis is prepared with 3 mm thick and 15 mm diameter plexiglass material.
The robot has two 6 V geared DC motors, two wheels and a caster ball wheel.
Fire fighting robot is powered by a 9 V alkaline battery.
| Fire Fighting Robot Video |
|
|