|
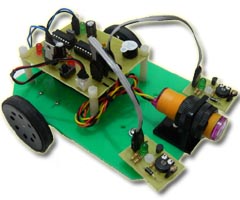
 Light follower robot is a mobile robot which detects the light (such as the light of a flashlight) and follows the light on the travelling path. Light follower robot is a mobile robot which detects the light (such as the light of a flashlight) and follows the light on the travelling path.
It also detects the obstacles while following the light. It has an infrared sensor for obstacle detection.
The robot has two light detection sensors which are prepared with LDRs (light dependent resistors). The sensitivity of the sensors can be set by using the trimpots on each sensor circuit.
Light follower robot is activated with light. The robot moves as long as it detects the light.
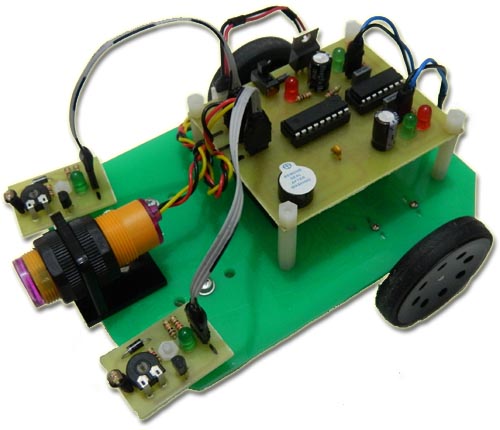
It has two 6 V geared DC motors, two wheels and a caster ball wheel.
Light following robot was powered only by a 9V alkaline battery.
PIC16F628A was used as microcontroller for the robot.
L293D motor driver was used for the driving of the DC motors.
Motors were driven by differential drive system.
| Light Follower - Obstacle Avoider Robot |
|
|