|
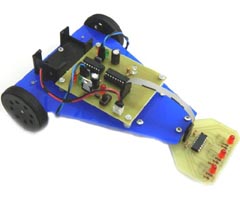
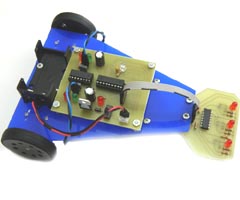
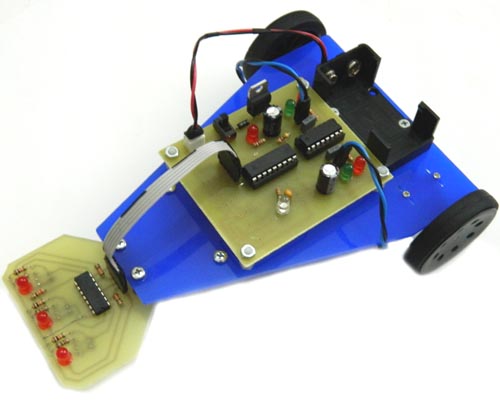
 This line follower robot tracks the white path on a black surface. This line follower robot tracks the white path on a black surface.
The robot uses 3 TCRT5000 sensors in order to track the line. 74HC14 Schmitt triger was used for the sensor circuit.
It has two 6 V geared DC motors, two wheels and a caster ball wheel.
The robot was powered by a 9 V alkaline battery.
PIC16F628A was used as microcontroller for the robot.
L293D motor driver was used for the driving of the DC motors.
Motors were driven by differential drive system.
| Mini Line Follower Robot Video |
|
|