|
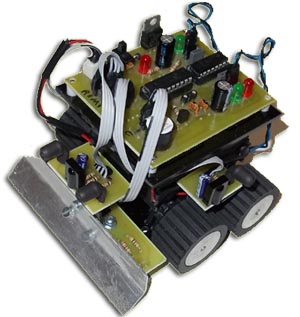
 Mini sumo robot has four 6 V 140 rpm geared DC motors equipped with four rubbered wheels. Mini sumo robot has four 6 V 140 rpm geared DC motors equipped with four rubbered wheels.
The robot has 3 IR sensors on its main circuit for the detection of the opponent robot. The sensor were prepared with TSOP1736 IR receiver modules and an IR LED.
In order to detect the borders of the ground, 2 CNY70 IR sensors were placed at the bottom of the robot.
Mini sumo robot has a compact design. The body of the robot was made of 3 mm plexiglass.
The dimensions of mini sumo robot are 10 cm x 10 cm.
Mini sumo robot was powered by 6 AA alkaline batteries.
PIC16F628A was used as microcontroller for the robot.
L293D motor driver was used for the driving of the DC motors.
Motors were driven by differential drive system.
|