|
 Obstacle avoider line follower robot follows white line on black surface and detects the obstacles on the path. Obstacle avoider line follower robot follows white line on black surface and detects the obstacles on the path.
When the robot detects an obstacle it passes by the obstacle, then return to the road and continues to follow the path.
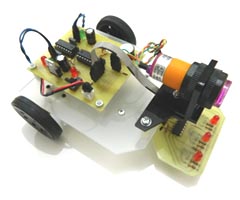
The robot uses 3 TCRT5000 sensors in order to track the line. 74HC14 Schmitt triger was used for the sensor circuit.
An MZ80 infrared sensor was used as the obstacle detecting sensor.
The robot was powered by a 9 V alkaline battery.
PIC16F628A was used as microcontroller for the robot.
The robot has 2 geared DC motors connected to 2 wheels and a caster ball wheel.
L293 motor driver used for the driving of the DC motors.
| Obstacle Avoiding Line Follower Robot Video |
|
|