|
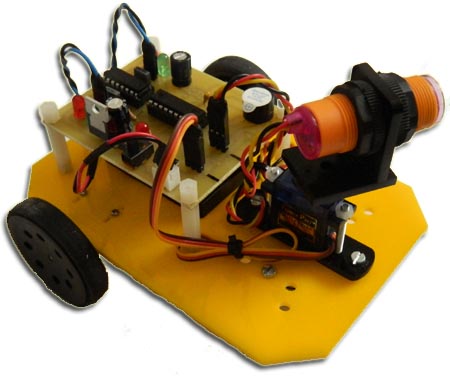
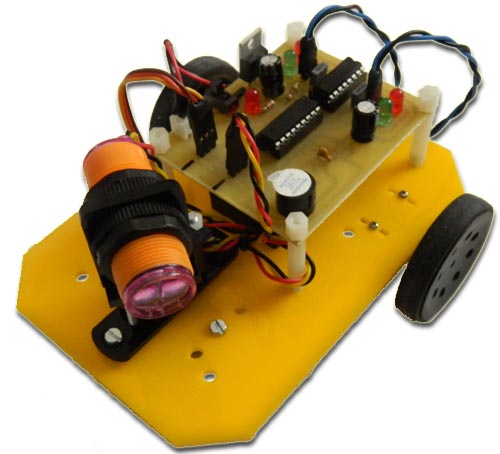
 This obstacle avoiding robot has an MZ80 infrared sensor for obstacle detection. This obstacle avoiding robot has an MZ80 infrared sensor for obstacle detection.
The MZ80 infrared sensor was mounted on a mini servo motor in order to provide the motion of the sensor while the robot is moving. Thus, the robot looks around, detect the obstacles and continue to move without crashing into the obstacles.
The robot has two 6 V geared DC motors equipped with two rubbered wheels.
The robot has a compact design. The body of the robot was made of 3 mm plexiglass.
Obstacle avoider robot was powered by one 9 V alkaline battery.
PIC16F628A was used as microcontroller for the robot.
L293D motor driver was used for the driving of the DC motors.
Motors were driven by differential drive system.
| Obstacle Avoider Robot Video |
|
|