|
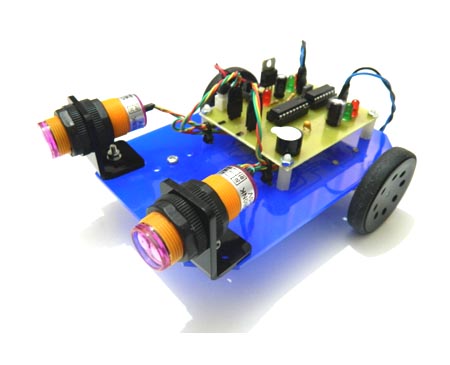
 This obstacle avoiding robot has two MZ80 infrared sensors for obstacle detection. This obstacle avoiding robot has two MZ80 infrared sensors for obstacle detection.
The robot has two 6 V geared DC motors equipped with two rubbered wheels.
The robot has a compact design. The body of the robot was made of 3 mm plexiglass.
Obstacle avoider robot was powered by one 9 V alkaline battery.
PIC16F628A was used as microcontroller for the robot.
L293D motor driver was used for the driving of the DC motors.
Motors were driven by differential drive system.
| Obstacle Avoider Robot Video |
|
|