|
 Obstacle avoider robot detects obstacles while it is moving. When it detects an obstacle, the robot gives buzzer signal and make the passes by the obstacles. Obstacle avoider robot detects obstacles while it is moving. When it detects an obstacle, the robot gives buzzer signal and make the passes by the obstacles.
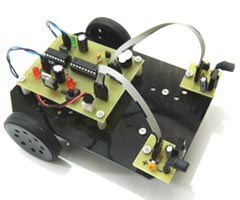
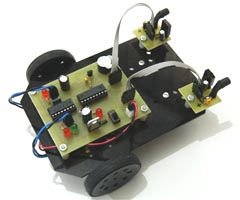
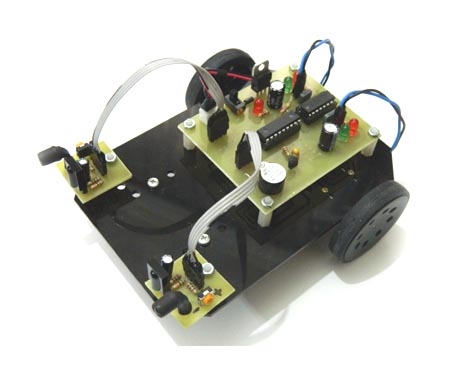
The robot has two infra red obstacle detection sensors which are prepared with IR emitting led and an infra red receiver. The sensitivity of the sensors can be set by using the trimpots on the circuits of each obstacle sensor.
The robot has two N20 geared dc motors connected to 2 wheels, and a caster ball wheel.
The robot was powered by a 9 V alkaline battery.
PIC16F628A was used as microcontroller for the robot.
L293 motor driver used for the driving of the DC motors.
| Obstacle Avoider Robot Video |
|
|