|
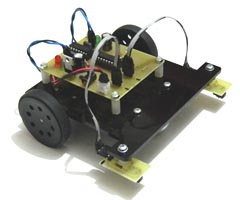
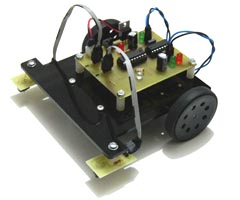
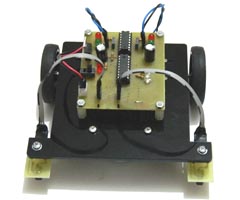
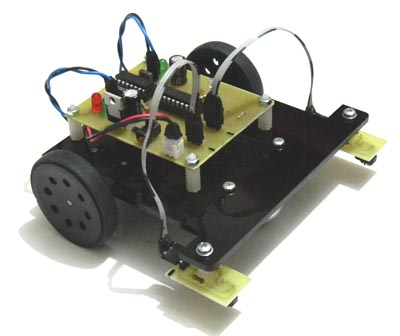
 This robot moves between the two parallel white lines on a black surface. This robot moves between the two parallel white lines on a black surface.
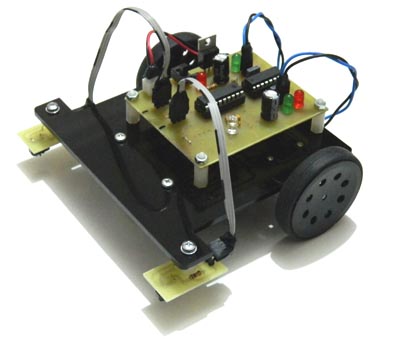
The robot uses 2 TCRT5000 sensors in order to detect the white lines.
It has two 6 V geared DC motors, two wheels and a caster ball wheel.
The robot was powered by a 9 V alkaline battery.
PIC16F628A was used as microcontroller for the robot.
L293D motor driver was used for the driving of the DC motors.
Motors were driven by differential drive system.
Robot Moving Between Lines
Video |
|
|