Mobil robotlar fiziksel bir noktaya sabitlenmemiş, tanımlanmış bir çevrede (karada, su altında ya da havada)hareket ederek istenilen fonksiyonları yerine getirebilen robotlardır.
Hareket sistemlerine göre mobil robotlar tekerlekli, paletli ve ayaklı tiplere ayrılabilirler. Mobil robotlar sabit endüstriyel robotlardan farklı olarak serbest hareket imkanına sahip olduklarından gerçekleştirmeleri istenen fonksiyonlara ve çalıştırılacakları çevreye bağlı olarak daha karmaşık kontrollere, daha yüksek performanslı ve daha çok tipte sensöre ihtiyaç duyabilmektedirler.
Mobil robotlar temelde insanlar için zor, tehlikeli ve sıkıcı olan görevleri yerine getirmek amacıyla tasarlanmıştır. Okyanuslarda ya da başka bir gezegende keşif yapmak, ince bir borunun içini temizlemek ya da sürekli aynı şekilde tekrarlanması gereken bir işi yapmak gibi.
Mobil robotlar otonom ya da bilgisayar kontrollü olabilir. Fakat her iki kontrolde de sensörler kullanılmalı ve gerekli çevresel faktörler robot tarafından algılanabilmelidir. İnsansı robotlar, keşif amaçlı kullanılan su altı robotları, uzay araştırmalarında kullanılan robotlar, eğlence ve eğitim amaçlı kullanılan robotlar, askeri ve güvenlik amacıyla kullanılan robotlar yaygın mobil robot örnekleridir.
 Sualtı Araştırma Robotları Sualtı Araştırma Robotları
 Güvenlik ya da keşif amacıyla kullanılan bilgisayar kontrollü ya da otonom mobil robotlardır. Bu tip robotlarda pusulalar, derinlik sensörleri, yön tarayıcılar, sıcaklık sensörleri ve sonar sensörler gibi sensörler kullanılmaktadır. Günümüzde su altı robotları genellikle bir operatörün uzaktan kontrolü ile çalıştırılmaktadır. Güvenlik ya da keşif amacıyla kullanılan bilgisayar kontrollü ya da otonom mobil robotlardır. Bu tip robotlarda pusulalar, derinlik sensörleri, yön tarayıcılar, sıcaklık sensörleri ve sonar sensörler gibi sensörler kullanılmaktadır. Günümüzde su altı robotları genellikle bir operatörün uzaktan kontrolü ile çalıştırılmaktadır.
Yandaki resim MIT de 1998 yılında çalışılmaya başlanmış ORCA isimli su altı robotunun 5. versiyonuna ait. 1998 yılında geliştirilen ilk versiyon bilgisayar kontrollü, 5 feet uzunluğunda, su basınç ve derinlik sensörüne, sonar yükseklik ölçere, 3 yönlü hız ölçere, 3 yönlü jiroskopa ve bir manyetik pusulaya sahiptir.
 Uçan Mobil Robotlar Uçan Mobil Robotlar
Genellikle insansız hava araçları ( Unmanned Aerial Vehicles- UAVs) olarak adlandırılan ve daha çok askeri amaçlarla kullanılan mobil robotlardır. Bu robotlar orduda; bombalama, keşif, savaş, lojistik ve arge amaçlı olarak kullanılmaktadır. Bunun yanısıra bu mobil robotlar sivil ve ticari amaçlarla da geliştirilmektedir. İnsansız hava araçlarında elektromanyetik dalga sensörleri, kameralar, mor ötesi ve mikrodalga spektrum sensörlerinin dışında havadaki biyolojik faktörleri ve mikroorganizmaları algılayan biyolojik sensörler ve havadaki element konsantrasyonlarını analiz edebilmek için kimyasal sensörler kullanılmaktadır.
Uzay Araştırma Robotları

Uzay araştırmalarının vazgeçilmezleri olan mobil robotlar keşifleri mümkün kılıyor.Mobil robotların uzay araştırmalarında kullanılmalarına ilk çarpıcı örnek 4 Aralık 1996 da NASA tarafından fırlatılan ve Mars yüzeyine 4 Temmuz 1997 de inen Sojourner olmuştur.
 NASA'nın ikiz jeolog robotları Spirit ve Opportunity Mars'ta suyun tarihini araştırmak için 10 Haziran ve 7 Temmuz 2003 tarihlerinde fırlatıldılar ve 4 Ocak ve 25 Ocak 2004 tarihlerinde Mars yüzeyine indiler. Yalnızca üç aylık bir görev için gönderilen Spirit ve Opportunity hala Mars yüzeyinde keşiflerini sürdürmekteler. NASA'nın ikiz jeolog robotları Spirit ve Opportunity Mars'ta suyun tarihini araştırmak için 10 Haziran ve 7 Temmuz 2003 tarihlerinde fırlatıldılar ve 4 Ocak ve 25 Ocak 2004 tarihlerinde Mars yüzeyine indiler. Yalnızca üç aylık bir görev için gönderilen Spirit ve Opportunity hala Mars yüzeyinde keşiflerini sürdürmekteler.

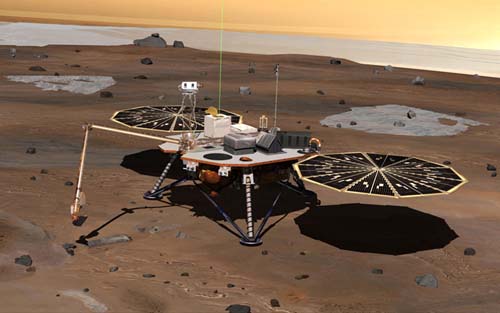
4 Ağustos 2007 de NASA Phoenix adlı robotunu da Mars'a fırllattı ve Phoenix 25 Mayıs 2008 de Mars yüzeyine indi. Phoenix Mars 'ta su ve yaşamı destekleyebilecek koşulların varlığı ile ilgili sorulara cevap aramak amacıyla gönderildi. Phoenix'in iniş yaptığı bölge yüzeye yakın buz içeren bir bölge ve Phoenix buradaki toprağı kazıp örnekler alarak analizler yapacak şekilde hazırlandı.
BEAM Robotlar
BEAM (Biology, Electronics, Aesthetic, Mechanics) robotlar biyolojik olaylardan esinlenerek tasarlanan basit küçük robotlardır. BEAM robotlarda mikrodenetleyiciler kullanılmaz. Karşılaştırıcılar, transistörler ve diyotlar gibi malzemeler ile hazırlanan basit analog devreler kullanılır.
 BEAM robotlar doğal organizmaların karakter ve davranışlarını kopya ederek farklı kaynaklara tepki verecek şekilde hazırlanır. Tepki verdikleri kaynağa göre; ısıya tepki veren (thermotrope), ışığa tepki veren (phototrope), sese tepki veren (audiotrope) ve radyo frekansına tepki veren (radiotrope) BEAM robotlar yapmak mümkündür. BEAM robotlar doğal organizmaların karakter ve davranışlarını kopya ederek farklı kaynaklara tepki verecek şekilde hazırlanır. Tepki verdikleri kaynağa göre; ısıya tepki veren (thermotrope), ışığa tepki veren (phototrope), sese tepki veren (audiotrope) ve radyo frekansına tepki veren (radiotrope) BEAM robotlar yapmak mümkündür.
* Bu makale Robotiksistem tarafından hazırlanmıştır. Robotiksistem.com kaynak gösterilmek kaydıyla kullanılabilir.
|