Çizgi izleyen robot belirli bir yolu otonom olarak takip edebilen robottur. Bu yol siyah zemin üzerinde beyaz renkte ya da beyaz zemin üzerinde siyah renkte olabilir.
Çizgi izleyen robotlar yarışma ve hobi amaçlı robotlar olmasına rağmen, geliştirildikleri takdirde endüstride sürekli belli bir yolda malzeme taşımak için ya da dükkanlar, kafeler gibi alanlarda benzer amaçlarla kullanılabilir.
Çizgi izleyen robotlarda önemli olan çizgiyi kaybetmemeyi sağlayacak düzgün kontrol ve hızdır.
Aşağıdaki şema bir çizgi izleyen robotun nasıl çalıştığını basitçe göstermektedir.
 Giriş Üniteleri: Giriş Üniteleri:
Giriş üniteleri beyaz zemin üzerindeki siyah çizgiyi ya da siyah zemin üzerindeki beyaz çizgiyi ayırt edebilmek için kullanılan elemanlardan oluşmaktadır. Çizgi izleyen robotlarda en sık kullanılan sensör CNY70 kontrast sensörleridir.
 CNY70 kontrast sensörü içerisinde bir adet fotodiyot ve bir adet fototransistör bulunur. Fotodiyot 950 nm dalga boyunda bir ışık yayar. ( IR ışık ). Fototransistörün base'i bu IR ışığın zemine çarpıp geri yansımasıyla tetiklenir. Bu şekilde siyah ve beyaz zeminlerde IR ışığın geri yansıması farklı olacağından CNY70 kontrast sensörü ile siyah ve beyaz renklerin ayırt edilmesi sağlanmış olur. CNY70 kontrast sensörü içerisinde bir adet fotodiyot ve bir adet fototransistör bulunur. Fotodiyot 950 nm dalga boyunda bir ışık yayar. ( IR ışık ). Fototransistörün base'i bu IR ışığın zemine çarpıp geri yansımasıyla tetiklenir. Bu şekilde siyah ve beyaz zeminlerde IR ışığın geri yansıması farklı olacağından CNY70 kontrast sensörü ile siyah ve beyaz renklerin ayırt edilmesi sağlanmış olur.
CNY70 kontrast sensörü analog sinyaller üretir. Analog sinyallerin mikrodenetleyicide işlenmesi için bu sinyaller 74HC14 schmitt triger çevirici kullanılarak digital sinyallere çevirilir. CNY70 kontrast sensörü siyah renk algıladığında analog sinyal değeri 0 V olmaktadır. 74HC14 schmitt triger çevirici ile bu analog sinyal lojik 0 değerine çevirilerek mikrodenetleyiciye gönderilir. CNY70 kontrast sensörü beyaz rengi algıladığında ise analog sinyal değeri 5 V olur ve 74HC14 schmitt triger çevirici bu değeri lojik 1 değerine çevirip mikrodenetleyicisiye gönderir.
Karar Verme Ünitesi:
Kullanılan mikrodenetleyici çizgi izleyen robotun karar verme ünitesidir. 74HC14 schmitt triger çeviriciden alınan sinyaller PIC16F84 mikrodenetleyicisinin giriş portlarına gönderilir. PIC16F84 mikrodenetleyicisi bu sinyalleri yazılan programa göre işler ve çizginin yerini belirleyerek motor çıkışlarına uygun sinyalleri gönderir.
Çıkış Ünitesi:
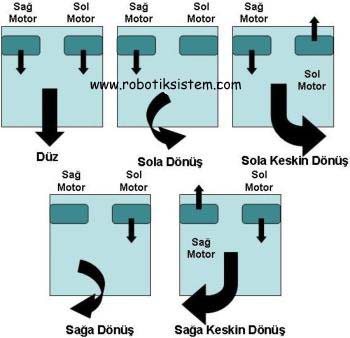
Çizgi izleyen robotlarda genellikle 2 adet DC motor kullanılır. Bu DC motorları kontrol edebilmek için PIC16F84 mikrodenetleyicisinin motor çıkışları bir motor sürücü devreye bağlanır. DC motorlar darlington transistörlerden kurulan H köprüsü devresi ile ya da L293 gibi bir motor sürücü entegre devre ile de kontrol edilebilir. L293 motor sürücü entegre devresi kullanımı kolay olduğundan dolayı daha çok tercih edilmektedir. L293 motor sürücü entegre devre kendi içinde iki adet H köprüsü barındırır. L293 motor sürücü entegre devre hakkında detaylı bilgi için datasheet indirebilirsiniz. Aşağıdaki şema motor sürüşünü göstermektedir.
* Bu makale Robotiksistem tarafından hazırlanmıştır. Robotiksistem.com kaynak gösterilmek kaydıyla kullanılabilir.
|






