This is a standard mini sumo robot that is designed with 2 geared DC motors. The robot has 3 IR sensors on it to detect the objects and opponents. 2 CNY70 sensors were used to detect the borders of the ground.
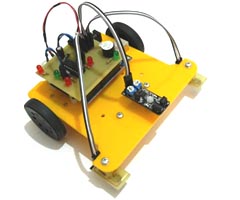
Fire Fighting Robot V2 follows the white line on the black background.
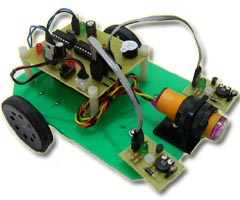
Two flame sensors on the robot detect the flames of the candles on both sides of the runway and turn it off with the fan installed on the servo motor.
This is a standard mini sumo robot that is designed with 4 geared DC motors. The robot has 3 IR sensors on it to detect the objects and opponents. 2 CNY70 sensors were used to detect the borders of the ground.
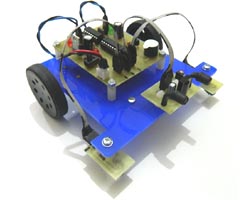
Robot moves between the two white lines on a black surface. It has 2 TCRT5000 sensors to detect the white lines and one infrared sensor to detect the obstacles on its road.
Obstacle avoiding robot detects the obstacles with its two infra red sensors, and continue to move around without crashing into the obstacles. It uses two hacked mini servo motors.
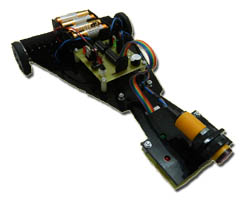
Diskbot Fire Fighting Robot resembles the Fire Fighting Robot V2. But it has a special chassis design.
It follows the white line on the black background and blows out the flames of the candles on both sides of the runway and turn it off with the fan installed on the servo motor.
Robot moves between the two white lines on a black surface. It has 2 TCRT5000 sensors to detect the white lines and one infrared sensor to detect the obstacles on its road.
Robot moves between the two white lines on a black surface. It has 2 CNY70 sensors to detect the white lines and one infrared sensor to detect the obstacles on its road.
Arduino Obstacle Avoiding Light Follower Robot moves in the direction that the light comes from by changing direction without impacting the obstacles in front...
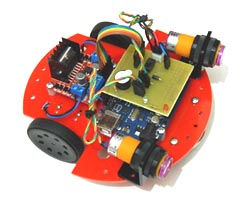
Diskbot Arduino Obstacle Avoider Robot has two MZ80 infrared sensors to detect obstacles. It is controlled by an Arduino Uno R3 and has a L298 motor driver board...