Arduino Motor Shield çift tam köprülü bir sürücü olan L298 temelli bir motor sürücü kartıdır. Kart DC motorlar, step motorlar, röleler ve selenoidler gibi çeşitli endüktif yükleri sürmek için tasarlanmıştır. Arduino kartınız ile bağımsız iki DC motoru sürmenizi, hız ve yön kontrolü yapmanızı sağlar. Buna ek olarak her bir motorun çektiği akımı ölçebilirsiniz. Kartın prototip çalışmalarında kolaylıkla kullanılabilmesi için kart üzerinde 6 adet konnektör bulunmaktadır.
 |
 |
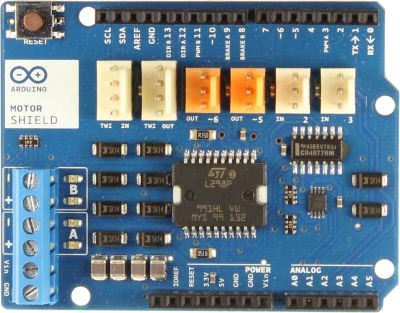
| Arduino Motor Shield ön yüz |
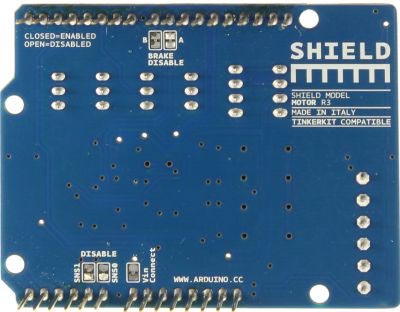
Arduino Motor Shield arka yüz |
 Arduino Motor Shield Özellikleri Arduino Motor Shield Özellikleri
 Motor sürücü: L298P, 2 DC motor ya da 1 step motor sürer Motor sürücü: L298P, 2 DC motor ya da 1 step motor sürer
Çalışma gerilimi : 5 - 12 V DC
Maksimum akım : Kanal başın 2 A veya harici güç beslemesi ile maksimum 4 A
Akım algılama: 1.65 V / A
Fren ve güç keserek durdurma fonksiyonu
 Arduino Motor Shield kart şematiği (PDF) Arduino Motor Shield kart şematiği (PDF)
Arduino Motor Shield Eagle çizim dosyaları (ZIP)
Güç
L298 motor sürücü entegresinin biri lojik diğeri ise motor beslemesi olmak üzere iki ayrı güç girişi olduğu için Arduino Motor Shield harici bir güç kaynağından beslenmek zorundadır. Çoğunlukla motorlar için gerekli olan akım USB 'nin maksimum akım sınırını geçecektir.
Harici
güç beslemesi AC-DC adaptör veya bir batarya ile sağlanabilir. Adaptör bağlantısı için Arduino kartı üzerindeki power jakı kullanılabilir. Bunun için adaptör ucunun 2.1 mm merkez pozitif olması gerekir. Alternatif olarak güç bağlantısı, polaritelerine dikkat ederek Vin ve GND klemensleri üzerinden de yapılabilir.
Arduino Motor Shield kartının bağlandığı Arduino kartının zarar görmemesi için 7 - 12 V aralığında bir harici güç beslemesi kullanılması önerilir. Eğer Arduino Motor Shield 5 - 7 V arasında bir voltajda kullanılacaksa, bu gerilim Arduino Motor Shield ile birlikte kullanılan Arduino ana kartının çalışma limitlerinin altında olacağı için Arduino kartı düzgün çalışmaz. Bu nedenle Arduino Motor Shield kartının bu aralıkta kullanabilmek için kartın altındaki "Vin Connect" lehim jumper'ının ortasındaki ince yolun lehimini sökmek veya bir bıçak ile kazımak gerekecektir. Böylelikle, Arduino Motor Shield kartı ile Arduino ana kartının Vin pinleri birbirinden ayrılır ve Arduino ana kartı, Arduino Motor Shield kartından bağımsız olarak beslenebilir. Arduino Motor Shield 7-12V aralığında bir gerilim ile besleneceği zaman bujumper olduğu gibi bırakılabilir veya daha önce bağlantısı kesilmiş ise yeniden lehimlenerek kart kullanılabilir.
Arduino Motor Shield kartı kanal başına sadece 2 A toplamda en fazla 4 A destekleyebilir.
Giriş ve Çıkışlar
Arduino Motor Shield kartının A ve B olmak üzere iki ayrı kanalı vardır. Bu kanallardan herbiri motoru sürmek veya ölçmek için 4 Arduino pini kullanır. Toplamda shield üzerinde kullanılan 8 pin vardır. Her bir kanal ayrı olarak 2 DC motor sürmek için kullanılabileceği gibi bunların kombine edilmesi ile 1 adet bipolar step motor da sürülebilir. Arduino Motor Shield pin tablosu aşağıdaki gibidir:
| Fonksiyon |
Kanal A |
Kanal B |
| Yön |
D12 |
D13 |
| PWM |
D3 |
D11 |
| Fren |
D9 |
D8 |
| Akım ölçümü |
A0 |
A1 |
Eğer fren ve akım ölçümü fonksiyonları kullanılmayacaksa ve proje için bu pinlere ihtiyaç duyuluyorsa, Arduino Motor Shield arkasından ilgili jumperlar sökülerek bu pinler farklı amaçlar için kullanılabilir.
Arduino Motor Shield kart üzerindeki ek olarak yer alan soketler ve klemensler aşağıdaki gibidir:
Klemensler: Motor ve güç bağlantısı için
Beyaz konektörler: Analog giriş için, A2 ve A3'e bağlı
Turuncu konektörler: Pwm çıkışı için, D5 ve D6'ya bağlı
4 pin beyaz konektörler: I2C (TWI) pinleri, biri giriş biri çıkış için kullanılabilir.
Motor Bağlantıları
Fırçalı DC motorların bağlantıları için motor uçları kart üzerindeki Kanal A ve Kanal B klemenslerine bağlanır. Böylelikle yön pinleri HIGH ve LOW yapılarak motor yönleri, PWM pinleri ile motor hızı kontrol edilebilir. Fren A ve B pinleri HIGH yapıldığında DC motorun hızı yavaş yavaş azaltılmak yerine motor etkili şekilde frenlenir. DC motorların çektiği akım SNS0 ve SNS1 pinlerinden ölçülebilir. Her bir kanal üzerinde akıma orantılı olarak voltaj ölçülür ve bu normal bir analog giriş gibi algılanır. Bu ölçümü okuyabilmek için A0 ve A1 pinlerinden analogRead() fonksiyonu kullanılır. Uyumluluk için bu çıkışlar en fazla 3.3 V ile sınırlandırıldığı için motorların 2A çekmesi durumunda 3.3 V çıkış alınabilir ve buna göre kalibrasyon yapılabilir.
* Bu makale Robotiksistem tarafından hazırlanmıştır. Robotiksistem.com kaynak gösterilmek kaydıyla kullanılabilir. |